Автор: Patrick J. Kelly (перевод редакции https://ecolm.ru)
Stephen Kundel’s магнитный мотор. Стивен показал полную конструкцию своего мотора в своем патенте на стр. 968 приложения. Он использовал простые колебательные движения магнитов статора так, чтобы они обеспечивали непрерывное вращение выходного вала.
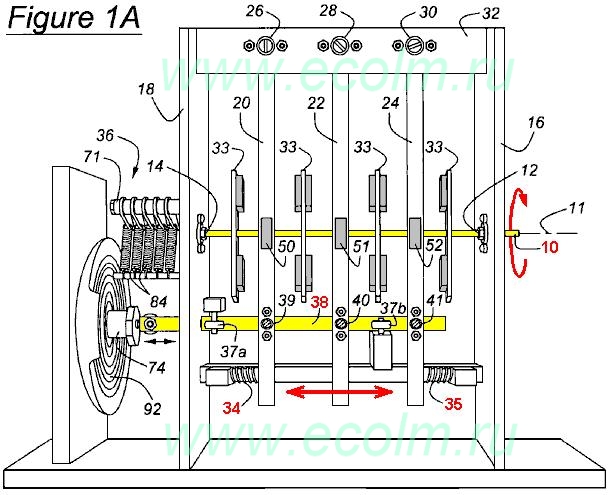
Желтую направляющую 38, на опорах справа и слева, двигает сердечник соленоида 74. Нет никакой очевидной причины, почему это возвратно-поступательного движения не может быть достигнуто с помощью механического рычага, соединенного с вращающимся выходным валом 10. Три рычага 20, 22 и 24, находятся в среднем положении за счет пружин 34 и 35. Магниты 50, 51 и 52, которые закреплены на этих рычагах, взаимодействуют с магнитами 33, вызывая непрерывное вращение выходного вала привода 10. Движение этих магнитов исключает положение, при котором магниты могут достичь точки равновесия и зафиксировать вал в одном положении.
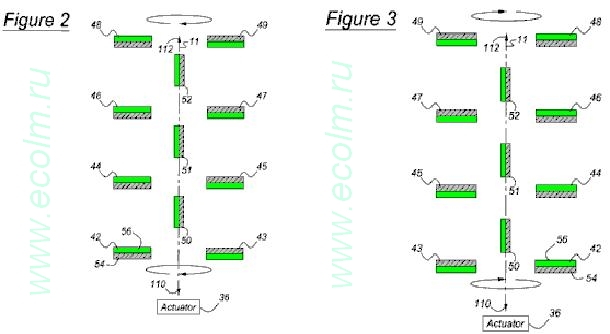
Рисунки 2 и 3 показывают положение магнитов, с циклами в 180 градусов (пол-оборота).
В данной конструкции можно использовать более мощные магниты для получения большей мощности.
Такая конструкция может понравиться не всем конструкторам, несмотря на то, что это должен быть один из самых простых магнитных моторов в настройке. Выходной уровень мощности может быть такой большой, как вы хотите, увеличивая мощность и количество дополнительных магнитов.
Рассмотрим процессы происходящие при движении взаимодействующих магнитных пар:
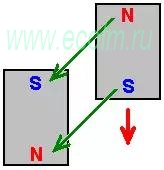
Магниты имеют сильное притяжение друг к другу из-за Северного и Южного полюсов. В то время, как двумя южными или двумя северными полюсами отталкиваются друг от друга, движение приближающегося магнита не прямо вдоль зеленых стрелок показаны, но изначально находятся в направлении, показанном красной стрелкой. Эта ситуация продолжается с подвижным магнитом, он приближается к неподвижному магниту и притяжение между ними становятся все сильнее. Но, ситуация меняется когда движение магнита достигнет ближайшей точки неподвижного магнита. Инерция заставляет продвигаться его мимо, но в этот момент направление притяжение между магнитами начинает тормозить поступательное движения с подвижным магнитом:
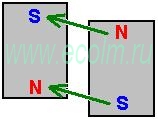
Если неподвижный магнит остается в таком положении, то подвижный магнит остановится прямо напротив неподвижного:
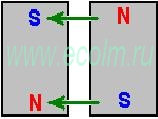
Направление сил между двумя магнитами теперь целиком и полностью горизонтальное и нет такой силы на подвижный магнит, чтобы заставить его двигаться. Это простые вещи, понятные всем, кто знаком с природой постоянных магнитов. Стивен прекрасно осознает это, и поэтому он смещает “зафиксированный” магнит быстро в сторону, прежде чем магнитные силы не начали действовать в обратном направлении. Он перемещает один магнит в сторону и одновременно перемещается другой, с противоположной полярностью:
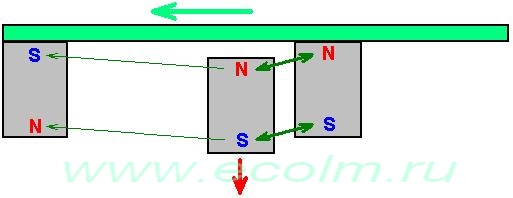
Новый магнит теперь гораздо ближе к подвижным магнитам и поэтому имеет гораздо большее влияние на него. Цикл повторяется.
Это очень простая операция требует очень небольшого усилия для перемещения боковых магнитов между двумя позициями, в то время как силы между статором и магнитами ротора могут быть достаточно высокими, производя значительный крутящий момент на ось, на котором крепятся диски ротора.
Эффективность системы дополнительно повышена, потому что магниты статора поочередно действуют на оба диска ротора:
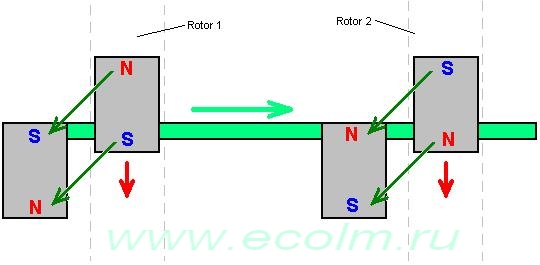
Для этого, магниты ротора 1 и 2 должны быть расположены разнополярно. Стивен в своей конструкции использует громкоговоритель, чтобы перемещать статорные магниты.
Автор: Patrick J. Kelly (перевод редакции https://ecolm.ru)
Предыдущая статья Следующая
